CUDA 第一个Hello World程序
《CUDA开发环境搭建》一章中我们写了一个Hello World程序来验证开发环境,现在我们从这一个Demo开始入手,开启我们的CUDA编程之旅吧!
1. 源码及解析
1.1. 源代码
#include <stdio.h>
__global__ void helloFromGPU()
{
printf("Hello World from GPU!\n");
}
int main()
{
printf("Hello World from CPU!\n");
helloFromGPU<<<1, 2>>>();
cudaDeviceSynchronize();
return 0;
}
1.2. 编译和运行
# 编译命令
nvcc hello.cu -o hello
# 运行命令
./hello
Hello World from CPU!
Hello World from GPU!
Hello World from GPU!
2. 代码解析
会发现整个代码和C语言几乎一样,只有几个特殊的地方,这里展开讲解。
2.1. 核函数定义
__global__ void helloFromGPU()
__global__关键字修饰的函数叫内核函数(kernel),也经常简称核函数。核函数是CUDA并行计算的入口点,是GPU上大量线程并行执行的代码。- 核函数可以从主机(
Host)调用并在设备(Device)上执行。 - 返回类型必须是void
- 核函数在GPU上并行执行,每个线程都会执行相同的代码
__global__在CUDA中也叫执行空间限定符,除__global__外,还有其他一些关键字,参见后面的内容。
2.2. 内核启动
helloFromGPU<<<1, 2>>>();
<<<1, 2>>>是CUDA特有的语法,称为"执行配置"- 第一个参数
1表示使用1个线程块 - 第二个参数
2表示每个线程块有2个线程
2.3. 同步操作
cudaDeviceSynchronize();
- CPU和GPU是异步执行的,这条语句让CPU等待GPU上的所有操作完成。
- 确保所有GPU输出都能在程序结束前显示。
3. 执行空间限定符
3.1. __global__
- 含义: “全局” 函数。这是一个在 GPU 上执行但可以从 CPU 调用的函数。函数调用的空间横跨了CPU和GPU,所以称为
__global__(全局的)。 - 功能: 用于定义内核(Kernel)。内核是 CUDA 并行计算的入口点,是 GPU 上大量线程并行执行的代码。
- 调用方式:
- 使用特殊的尖括号语法
<<<grid_dim, block_dim>>>从主机调用。 - 返回值必须为
void。 - 无法直接获取其返回值(需要通过设备内存传递结果)。
- 使用特殊的尖括号语法
3.2. __device__
- 含义: “设备” 函数。它只能在 GPU 上执行,并且只能被 GPU 上的其他函数调用。
- 功能: 充当设备代码的辅助函数。用于封装一些在
__global__内核中重复使用的逻辑,使代码更模块化、更清晰。 - 调用方式:
- 只能在其他
__device__或__global__函数内部调用。 - 无法从主机 CPU 直接调用。
- 只能在其他
// 一个设备端辅助函数,计算平方
__device__ float square(float x) {
return x * x;
}
__global__ void anotherKernel(float *a, float *b) {
int idx = ...; // 计算索引
// 在内核中调用设备函数
b[idx] = square(a[idx]);
}
// 错误示例:不能在主机函数中调用 __device__ 函数
int main() {
// square(2.0f); // 这行代码无法编译!
}
3.3. __host__
- 含义: “主机” 函数。它只能在 CPU 上执行,并且只能被 CPU 上的其他函数调用。
- 功能: 这就是标准的 C/C++ 函数。如果一个函数没有任何限定符,它默认就是
__host__函数。显式地写上__host__通常是在使用组合限定符的场景,或者为了强调说明。 - 调用方式: 像普通函数一样调用。
// 以下两个函数是等价的
void hostFunction1() { ... } // 默认是 __host__
__host__ void hostFunction2() { ... } // 显式声明
3.4. 组合使用
CUDA 允许将 __host__ 和 __device__ 限定符组合在一起使用。这告诉编译器:请为这个函数同时生成主机版本和设备版本。
- 功能: 用于编写既可以在 CPU 上运行,也可以在 GPU 上运行的函数。这对于代码复用和避免写两套相同的函数非常有用。
- 限制: 函数不能有复杂的标准库调用(如
printf,malloc),因为设备版本无法支持这些。只能使用 CUDA 支持的 C++ 语法和内置函数。
// 编译器会为该函数生成两个版本:一个在CPU上运行,一个在GPU上运行。
__host__ __device__ float calculateSomething(float a, float b) {
return (a + b) * (a - b);
}
// 主机代码可以调用
void main() {
float cpu_result = calculateSomething(5.0, 3.0); // 调用主机版本
}
// 设备代码也可以调用
__global__ void myKernel() {
float gpu_result = calculateSomething(5.0, 3.0); // 调用设备版本
}
注意:你不能将 __global__ 与 __host__ 或 __device__ 组合使用,因为 __global__ 的定义(在 GPU 执行,从 CPU 调用)与它们的定义是冲突的。
3.5. 总结与对比表
为了更清晰地理解,我们可以从多个维度对它们进行对比:
| 特性 | __global__ | __device__ | __host__ |
|---|---|---|---|
| 执行位置 | GPU | GPU | CPU |
| 调用者 | CPU (通常) / GPU (动态并行) | GPU (其他设备函数) | CPU |
| 返回值 | 必须为 void | 任意类型 | 任意类型 |
| 主要用途 | 并行计算的入口点 (内核) | 设备代码的辅助函数 | 普通的主机函数 |
| 调用语法 | func<<<Dg, Db>>>(args) | func(args) (在设备代码中) | func(args) |
| 可否从主机调用 | 可以 (使用 <<<>>>) | 不可以 (编译错误) | 可以 |
| 可否从设备调用 | 可以 (需CUDA动态并行) | 可以 | 不可以 (编译错误) |
说明: CUDA动态并行的概念会在后面的章节中讲解,暂时你可以先忽略他。
4. 线程层次结构
CUDA 的线程模型是其并行计算能力的核心,它采用了一种层次化的组织结构,使得程序员能够高效地管理和调度成千上万个并发线程。这个模型是理解 CUDA 编程的基础。
CUDA 的线程模型采用三层结构,从大到小分别是:网格 (Grid) → 线程块 (Block) → 线程 (Thread)。
4.1. Grid、Block、Thread
4.1.1. 线程 (Thread) - 最基本的执行单元
- 角色:最小的执行单位,每个线程独立执行相同的内核代码
- 特点:
- 拥有自己的程序计数器、寄存器组
- 执行相同的指令,但处理不同的数据(SIMT架构)
- 通过内置变量区分彼此的身份
4.1.2. 线程块 (Block) - 线程的集合
- 角色:一组协同工作的线程的容器
- 重要特性:
- 共享内存:块内的线程可以通过
__shared__内存高效通信 - 同步机制:块内线程可以使用
__syncthreads()进行同步 - 线程限制:一个线程块中的所有线程都需驻留在同一个流式多处理器核心(SM)上,因此每个线程块中的线程数量是有限制的,限制大小因GPU的交互而异,目前最大不超过1024个线程。
- 维度:可以组织成一维、二维或三维结构
- 共享内存:块内的线程可以通过
4.1.3. 网格 (Grid) - 线程块的集合
- 角色:所有线程块的容器,构成一个完整的内核启动
- 特点:
- 包含一个或多个线程块
- 块间通常不需要同步(除非使用较新的特性)
4.2. 线程模型示意图
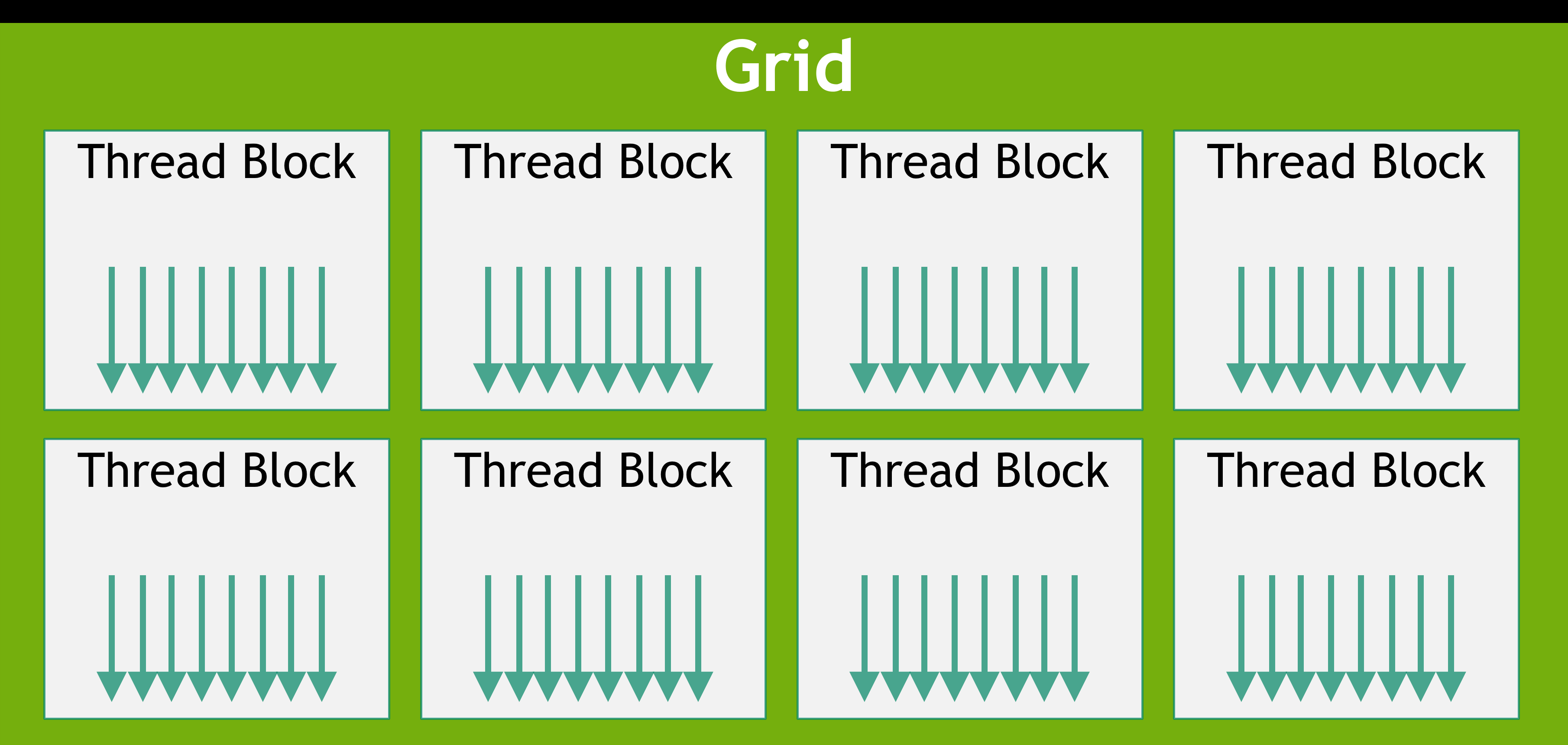 图1:线程块网格
图1:线程块网格
在核函数调用时,一个核函数可以由多个形状相同的线程块执行。因此,线程总数 = 每个线程块中的线程数 * 线程块的数量。
如:
// 1个block, 每个block2个thread,线程总数 = 1 * 2 = 1
helloFromGPU<<<1, 2>>>();
// 2个block, 每个block5个thread,线程总数 = 2 * 5 = 10
helloFromGPU<<<2, 5>>>();
4.3. 内置坐标变量
4.3.1. 坐标变量说明
CUDA 提供了一系列内置变量用于标识线程的位置:
| 变量 | 描述 | 维度 |
|---|---|---|
threadIdx.x, .y, .z | 线程在块内的索引 | 3D |
blockIdx.x, .y, .z | 块在网格内的索引 | 3D |
blockDim.x, .y, .z | 块的维度(每个方向的线程数) | 3D |
gridDim.x, .y, .z | 网格的维度(每个方向的块数) | 3D |
说明:
- block的索引和thread的索引可以组织成一维、二维或三维的结构。
- 一维时只会使用
threadIdx.x,二维时会使用threadIdx.x和threadIdx.y,三维时会使用threadIdx.x、threadIdx.y和threadIdx.z。 - 现在我们只需要先理解一维的场景,更复杂的场景会在后面的章节中讲解。
计算全局线程ID:
对于一维的网格和块,计算全局线程ID的公式为:
int globalId = blockIdx.x * blockDim.x + threadIdx.x;
4.3.2. Demo示例
我们修改一下上面的Demo如下:
// version 2.0
#include <stdio.h>
__global__ void helloFromGPU()
{
int globalId = blockIdx.x * blockDim.x + threadIdx.x;
printf("Hello World from GPU! blockIdx:%d, threadIdx:%d, globalId:%d\n", blockIdx.x, threadIdx.x, globalId);
}
int main()
{
printf("Hello World from CPU!\n");
helloFromGPU<<<2, 3>>>();
cudaDeviceSynchronize();
return 0;
}
执行结果如下:
# 编译
nvcc ./hello.cu -o ./hello
# 运行
./hello
Hello World from CPU!
Hello World from GPU! blockIdx:1, threadIdx:0, globalId:3
Hello World from GPU! blockIdx:1, threadIdx:1, globalId:4
Hello World from GPU! blockIdx:1, threadIdx:2, globalId:5
Hello World from GPU! blockIdx:0, threadIdx:0, globalId:0
Hello World from GPU! blockIdx:0, threadIdx:1, globalId:1
Hello World from GPU! blockIdx:0, threadIdx:2, globalId:2
5. 总结
到目前为止,我们通过Hello World的程序,了解了CUDA编程最核心的两个概念:执行空间限定符和线程层次结构模型。